Platform over productie- en procesautomatisering
Handen zijn misschien wel het meest gebruikte gereedschap van de mens. Met hun beweeglijkheid, fijne motoriek en gevoelige haptiek vormen ze de belangrijkste brug tussen het menselijk lichaam en zijn omgeving. Eén van de grootste en tegelijkertijd meest veelbelovende uitdagingen binnen de robotica is om dit brede palet aan functionaliteit te reproduceren in een kunstmatige hand. Dankzij miljoenen jaren van evolutie kunnen mensen met hun handen complexe bewegingen coördineren, voorwerpen op verschillende manieren vastpakken of grijpen, reageren op externe stimuli en gedoseerd kracht uitoefenen. En die veelzijdigheid verwachten we nu ook van robothanden, of het nu gaat om automatisering of medische robotica, in industriële toepassingen of moderne protheses. Het gaat om vorm en mobiliteit, maar ook om miniatuurmotoren, intelligente besturingen en de mogelijkheid om in te spelen op veranderende omgevingsomstandigheden.
Handen zijn een indrukwekkend samenspel van 27 botten, meer dan 30 gewrichten en spieren en talloze pezen en zenuwen, die zorgen voor maximale flexibiliteit en controle. Aan een kunstmatige hand worden dan ook hoge eisen gesteld: hij moet tegelijkertijd stevig, flexibel, licht, stabiel, compact en efficiënt zijn. Dat vraagt het uiterste van de materialen, het ontwerp en – het belangrijkste – de aandrijftechniek. Elektromotoren zorgen voor krachtige bewegingen, sensoren leveren de benodigde feedback en intelligente systemen voor de aansturing coördineren alle processen in real-time. Dit geldt voor humanoïde robotica net zo goed als voor moderne prothesetechnologie. De beide werkvelden zijn nauw verwant en gebruiken vergelijkbare technische principes om bewegingen mogelijk te maken, die het menselijke origineel zo dicht mogelijk benaderen. Voor de meest natuurlijke werking hebben robothanden extreem nauwkeurige en perfect afgestemde componenten nodig. Het doel is een symbiose van technologie en biologie, die menselijke vaardigheden aanvult of het verlies van vaardigheden opvangt.
Humanoïde robots vormen de interface tussen kunstmatige intelligentie en de echte, fysieke wereld. Hun handen zijn niet alleen gereedschap, maar ondersteunen ook expressie en interactie. De kwaliteit van de bewegingen – hoe soepel, krachtig of nauwkeurig ze zijn – is voornamelijk afhankelijk van de onderliggende aandrijftechniek. Miniaturisatie, precisie, dynamiek en rendement geven de doorslag voor een geslaagd ontwerp. Alle elementen moeten perfect op elkaar aansluiten om de bewegingen een menselijke natuurlijkheid te geven. Vooral een hoog rendement is belangrijk, omdat de inbouwruimte en energiebronnen beperkt zijn, en de aandrijvingen wel betrouwbaar moeten werken.
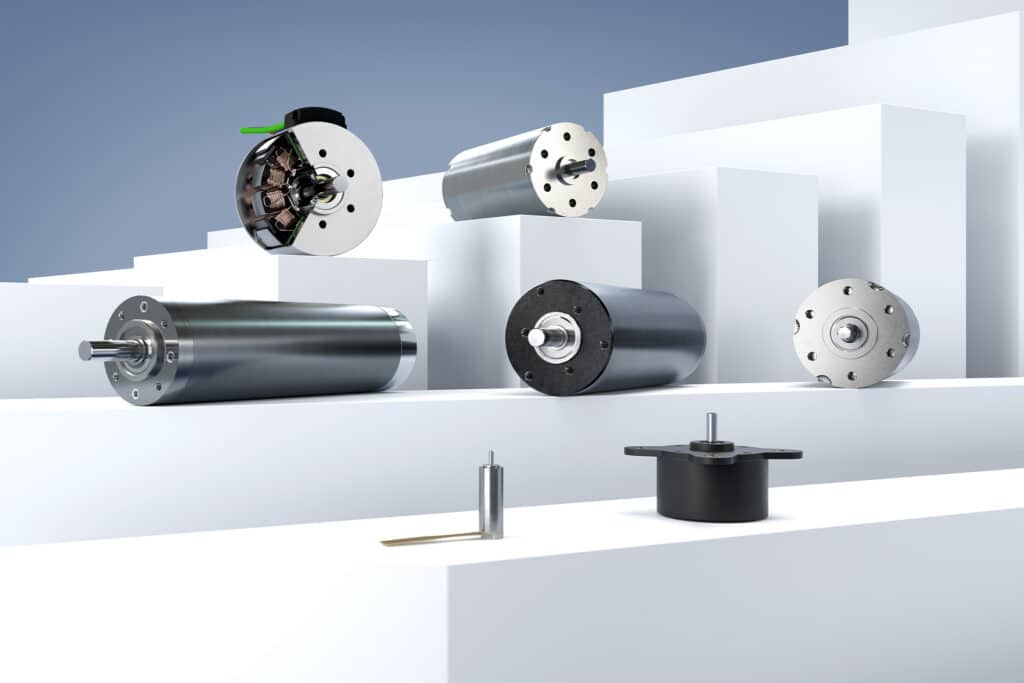
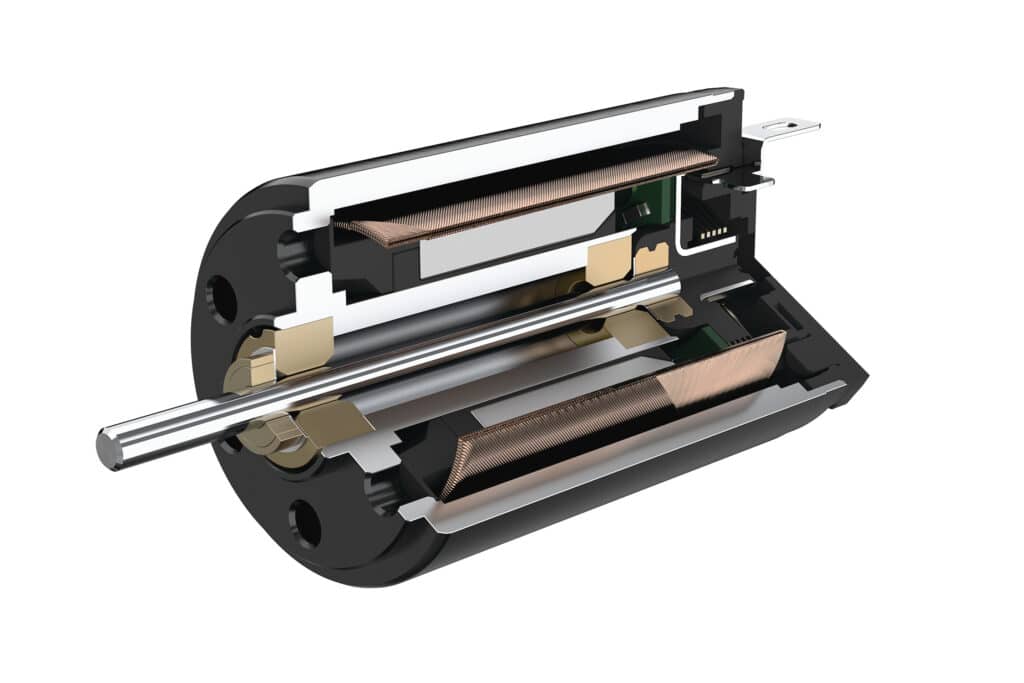
De vingers van een robothand of prothese moeten individueel kunnen bewegen. Hiervoor wordt iedere afzonderlijke vinger aangedreven door één of meer actuatoren. Per hand werken vaak meer dan 20 aandrijvingen samen om de meest complexe bewegingen mogelijk te maken. Dat vraagt om extreem compacte aandrijvingen – die meestal bestaan uit een motor, encoder, planetaire tandwielkast, spindel en controller. Alleen dan kunnen de vingers individueel worden gepositioneerd voor verschillende grijppatronen, van stevig beetpakken tot delicate bewegingen. De DC-motoren uit de SXR-productfamilie van FAULHABER zijn bijzonder geschikt voor deze veeleisende toepassing. Met een innovatieve wikkeling, krachtige zeldzame-aardemagneten en verschillende combinatiemogelijkheden voor nauwkeurige planetaire tandwielkasten leveren ze de ideale specificaties voor een kunsthand.
FAULHABER heeft tientallen jaren ervaring met de ontwikkeling en productie van extreem nauwkeurige aandrijfsystemen, en het kent de speciale eisen die robothanden en moderne protheses stellen aan de technologie. Micromotoren van FAULHABER worden wereldwijd ingezet in hoogwaardige medische protheses en robotsystemen. Ze ondersteunen een lang gekoesterde technische droom: krachtige, gevoelige en dynamische bewegingen, in de kleinst mogelijke ruimtes. Want zowel in het menselijk lichaam als in een humanoïde robot begint de kwaliteit van een beweging met de juiste aandrijving.
Neem dan rechtstreeks contact op met FAULHABER Benelux B.V..
 Contact opnemen
Contact opnemen
WE CREATE MOTION Drive systems from FAULHABER are masterpieces of precision engineering and electromechanics at the limits of the technically feasible.
Bekijk Bedrijfsprofiel