Platforme sur l'automatisation de la production et des processus
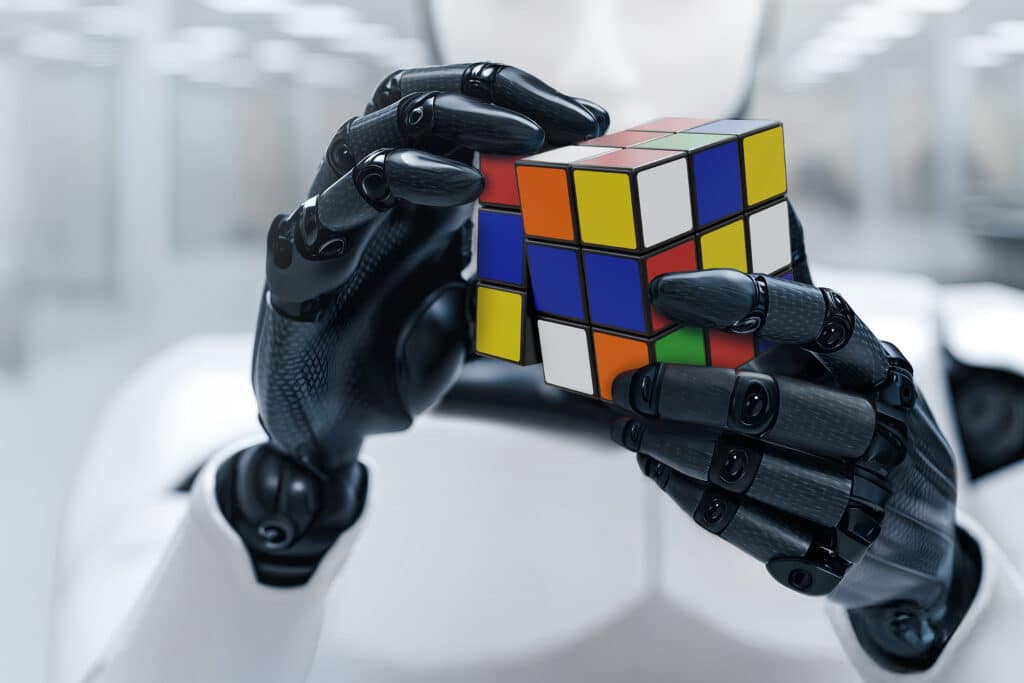
La main est probablement l’outil humain le plus utilisé. Sa dextérité, sa motricité fine et son retour sensoriel en font l’interface entre le corps et son environnement. Reproduire cette fonctionnalité fascinante dans une main artificielle représente l’un des plus grands défis de la robotique, mais aussi l’un des plus prometteurs. Que ce soit dans l’automatisation ou la robotique médicale, dans des applications industrielles ou dans la prothétique moderne, les mains robotiques doivent accomplir ce que la main humaine a perfectionné au fil des millénaires : coordonner des mouvements complexes, appliquer diverses techniques de préhension, réagir aux stimuli externes et doser précisément la force. Il ne s’agit pas seulement de forme et de mobilité, mais aussi de moteurs miniatures, d’un contrôle intelligent et de la capacité d’adaptation à des environnements changeants.
La main humaine est un système hautement complexe et finement accordé dans lequel interagissent 27 os, plus de 30 articulations et muscles, ainsi que de nombreux tendons pour une flexibilité et un contrôle extrêmes. Pour une main artificielle, cela signifie qu’elle doit être conçue pour être à la fois robuste et flexible, légère et stable, compacte et puissante. C’est un exercice d’équilibriste qui impose des exigences élevées en termes de matériaux, de conception et surtout de technologie d’entraînement. Les moteurs électriques génèrent des mouvements puissants, les capteurs fournissent les retours nécessaires et les systèmes de commande intelligents coordonnent les opérations en temps réel. En bref : pour qu’une main robotique puisse bouger de la manière la plus naturelle possible, elle a besoin de composants internes précis et finement accordés. L’objectif est de créer une symbiose entre technologie et biologie, que ce soit pour retrouver des fonctions perdues ou pour augmenter des capacités humaines. La frontière entre la robotique humanoïde et la prothétique moderne est floue. Ces disciplines s’appuient toutes les deux sur des principes techniques similaires pour reproduire au mieux les mouvements humains.
Les robots humanoïdes font le lien entre l’intelligence artificielle et le monde physique réel. Leurs mains ne sont pas seulement des outils, mais aussi des moyens d’expression et d’interaction. La qualité de leurs mouvements, autrement dit la fluidité, la puissance ou la précision avec lesquelles ils sont exécutés, dépend essentiellement de la technologie d’entraînement sous-jacente. Miniaturisation, précision, dynamique et efficacité énergétique ne sont pas de vains mots, mais des facteurs clés de réussite. Ces éléments doivent parfaitement interagir pour que les mouvements paraissent si naturels qu’on les confondrait presque avec ceux d’un être humain. L’efficacité énergétique joue ici un rôle primordial, puisque l’espace et l’alimentation en énergie sont restreints, alors que le système d’entraînement doit rester parfaitement fiable.
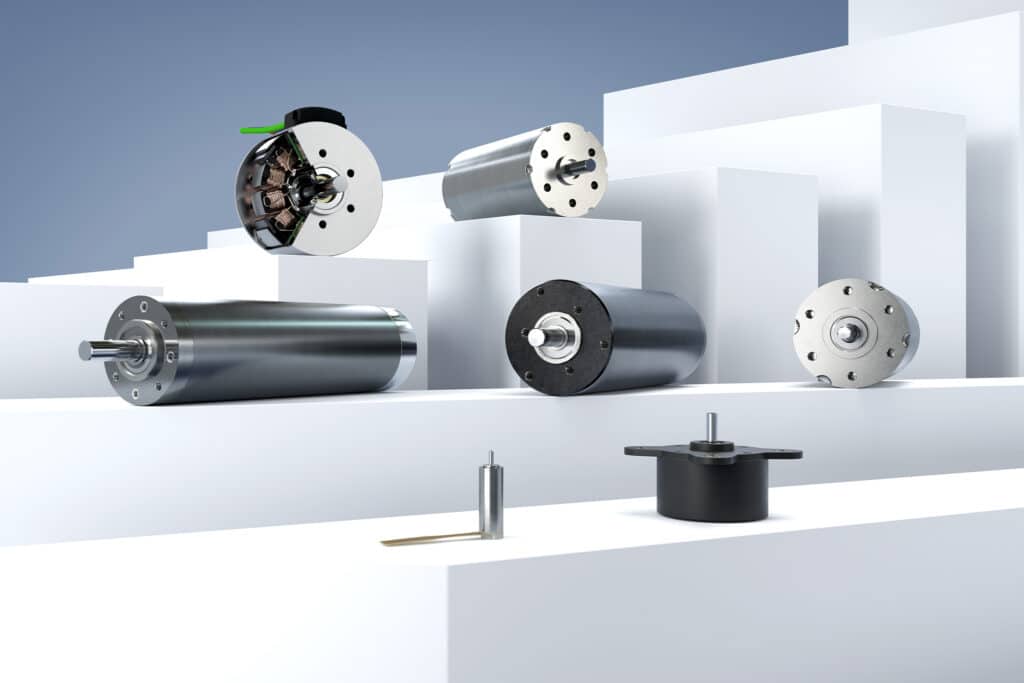
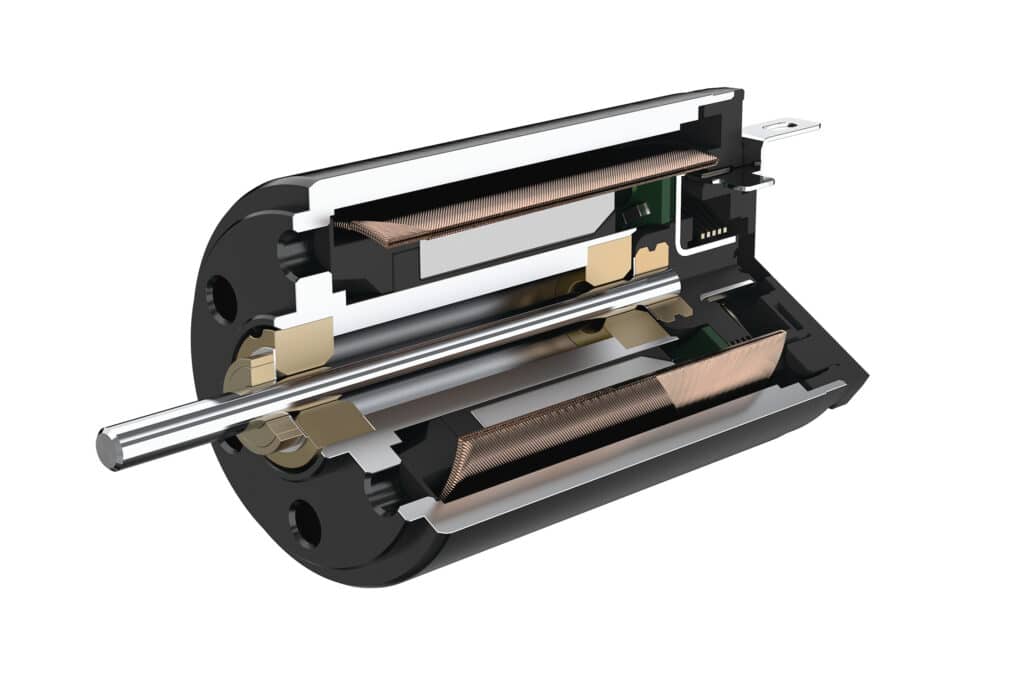
Pour pouvoir bouger individuellement les doigts d’une main robotique ou prothétique, ils doivent tous être entraînés par un ou plusieurs actionneurs, séparément. Il n’est pas rare que plus de 20 entraînements soient nécessaires pour permettre à la main les mouvements les plus complexes. Ces entraînements, généralement composés d’un moteur, d’un codeur, d’un réducteur planétaire, d’une vis-mère et d’une commande, doivent évidemment être extrêmement compacts. Ce n’est qu’ainsi que les doigts peuvent être agencés individuellement pour divers schémas de préhension, des mouvements filigranes jusqu’aux prises puissantes. Les moteurs C.C. de la famille SXR de FAULHABER sont particulièrement adaptés à ce type exigeant d’application. Grâce à leur géométrie d’enroulement innovante, leurs aimants en terres rares haute performance et leurs nombreuses combinaisons possibles avec des réducteurs planétaires de haute précision, ils sont parfaitement adaptés à une utilisation dans des mains artificielles.
FAULHABER dispose de décennies d’expérience dans le développement et la production de systèmes d’entraînement de haute précision et connaît les exigences spécifiques des mains robotiques et des prothèses modernes. Les micromoteurs de FAULHABER sont utilisés dans le monde entier, aussi bien dans les prothèses médicales haut de gamme que dans les systèmes robotiques. Ils rendent possible ce qui a été longtemps considéré comme visionnaire : des mouvements puissants, sensibles et dynamiques dans des espaces très réduits. Car qu’il s’agisse du corps humain ou d’un robot humanoïde, la qualité de chaque mouvement commence par le bon entraînement.