Platform over productie- en procesautomatisering
Wanneer een Belgische machinebouwer betrokken wordt bij een ambitieus internationaal roboticaproject, heeft hij dat doorgaans louter aan zichzelf te danken. Het was bij Vintiv niet anders, toen het als partner gevraagd werd voor het ROSSINI platform. De directe band van de Limburgse speler met applicaties en technische uitdagingen was hier zeker niet vreemd aan.
‘Rossini’ staat voor ‘robot enhanced sensing, intelligence and actuation to improve job quality in manufacturing’. Het omvat een samenwerkingsplatform van dertien internationale industriële en academische partners, waaronder Vintiv. Dit consortium omvat naast constructeurs, fabrikanten en eindgebruikers, ook onderzoeksinstellingen. Centraal hierbij staat het ontwerpen en implementeren van een veilige en efficiënte robot-mens-interactie bij toepassingen in een productieomgeving.
“De basis van het Rossini project is de Europese ambitie om aan ‘het buitenland’ verloren maakindustrie maximaal terug op Europese bodem te krijgen”, zegt Joris Ceyssens, directeur sales. “Een bepalende factor is hier de flexibele automatisering, die rechtstreeks voortvloeit uit het industrie 4.0 verhaal.“
Om geautomatiseerd en tegelijk heel flexibel producten te kunnen maken, is het cruciaal om mens en machine zo goed en uiteraard veilig mogelijk te laten samenwerken.
Een belangrijke innovatie die dankzij Rossini het licht zag, was een intelligent camerasysteem, ontwikkeld door Datalogic.
In de praktijk visualiseert dit systeem constant alle elementen binnen een voorgedefinieerde werkruimte, en is het in staat om op elk ogenblik de positie van mens én robot ten opzichte van elkaar te bepalen. Het gecombineerde beeld van meerdere camera’s levert een pixelvoorstelling van mens en robot op binnen één 3D-omgeving, met op elk ogenblik een minimale afstandsmeting tussen beide.
Het systeem is bovendien in staat om bijkomende sensorsignalen van bijvoorbeeld scanners in de visualisatie te betrekken. Dit maakt de meest complexe beeldvorming van bijvoorbeeld dode hoeken mogelijk.

Door alle detectorsignalen in één controlesysteem te groeperen, kan rechtstreeks op de uitvoeringsdynamiek van de robot worden ingegrepen: de robot opereert zo binnen een ruime safety layer, waarbinnen hij trager zal werken bij aanwezigheid van mensen of indien nodig zal stoppen.
Men kan bovendien via ROS (Robot Open Source) de robot zo programmeren, dat deze een alternatief traject volgt dat de positie van de mens zal mijden, in plaats van naar een stop over te gaan. Men spreekt in dit geval van Dynamic Safety.

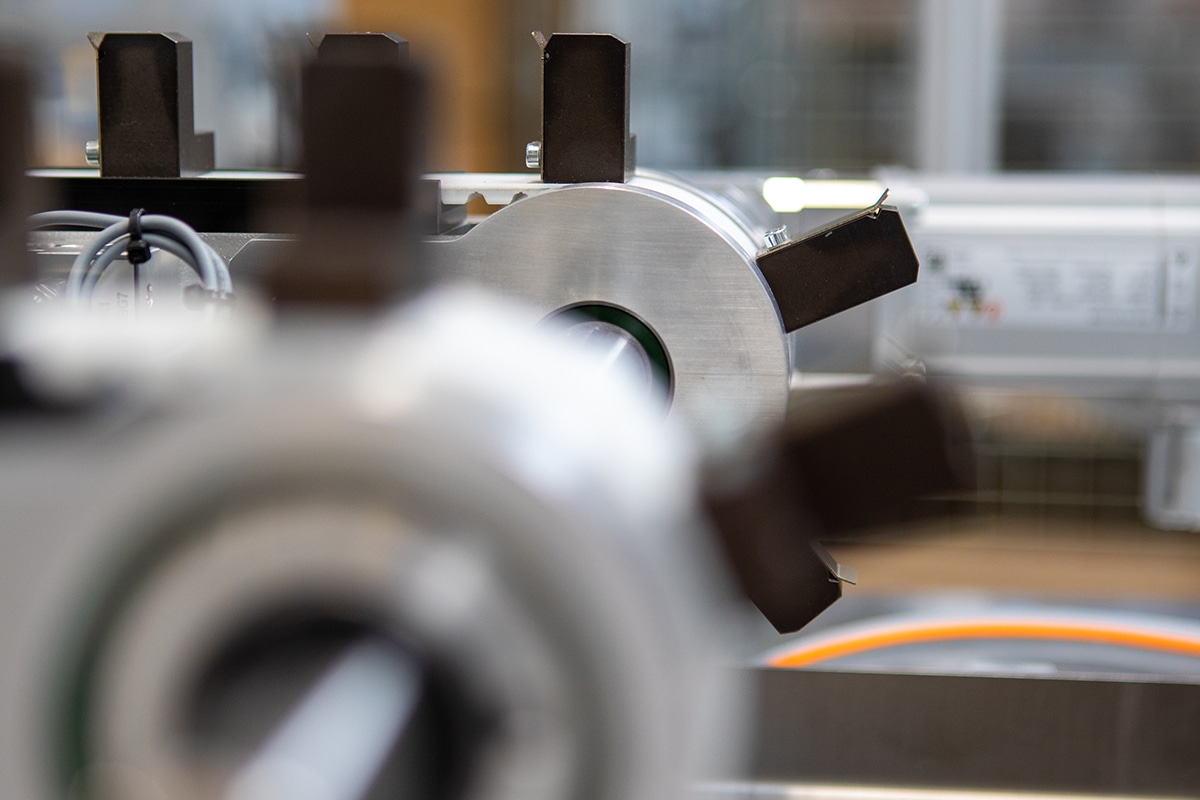
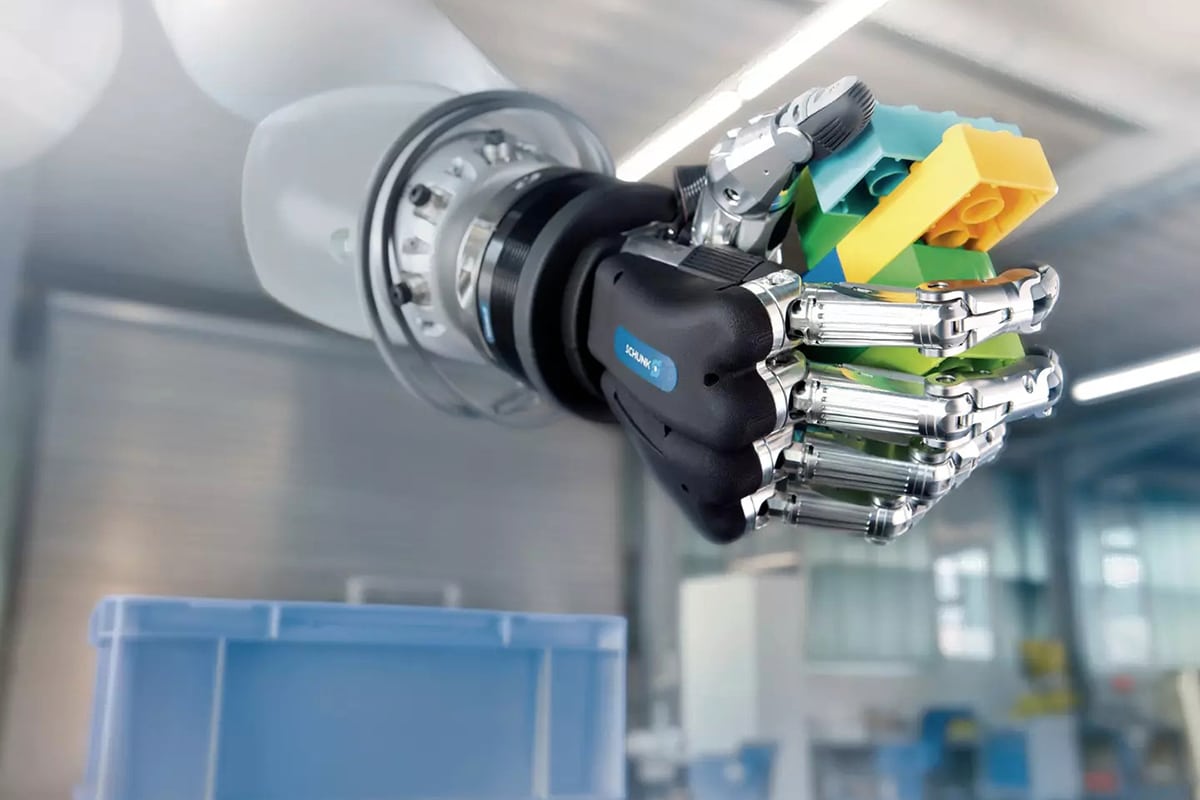
Vintiv mocht binnen het Rossini project een cobothand op maat ontwerpen. Deze had als functie het plaatsen van het ballastgewicht in een wasmachine of droogkast. Niet evident, omdat die hand in staat moet zijn om 25 kilogram te manipuleren. Een processtap die voorheen manueel gebeurde, arbeidsintensief en zwaar was, en procestijd kostte.
De operator diende wel enkele schroeven aan te draaien terwijl de robot het stuk op de juiste plaats moest houden. Het stuk mocht niet vallen, en daarom werd voor een gecombineerde grijper gekozen, die eerst het stuk pneumatisch vastneemt en uit de bak tilt. Wanneer de steen uit de bak is, wordt hij door de grijper geklemd, zodat hij niet meer kan vallen.
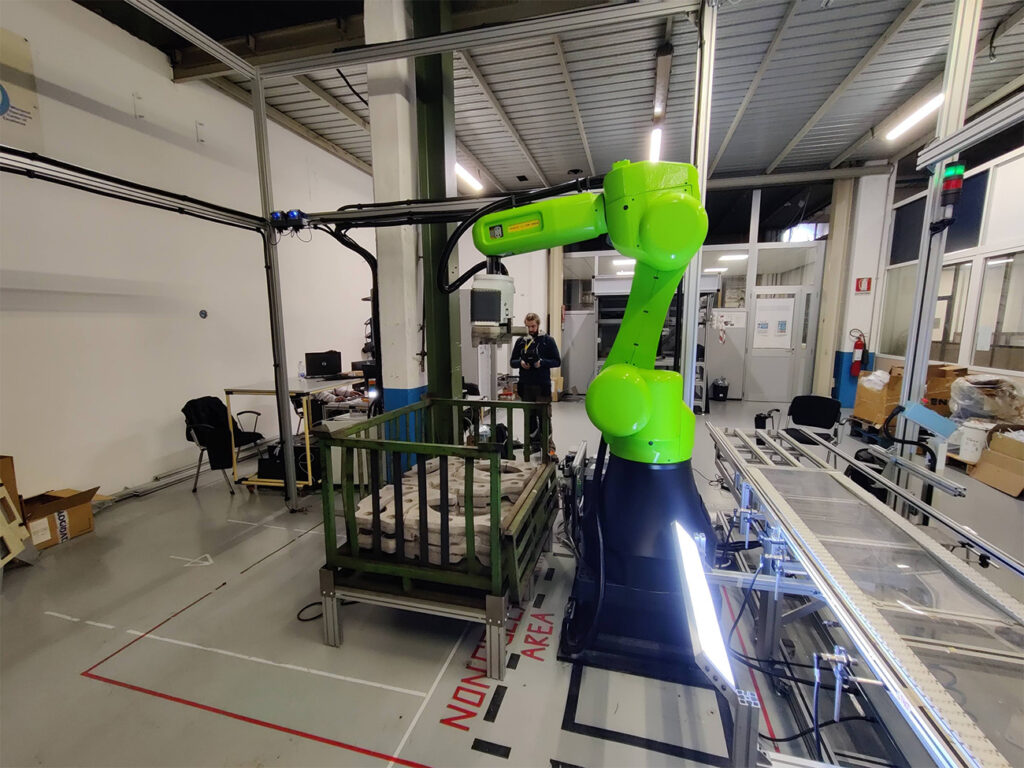
Om de samenwerking tussen man en machine te optimaliseren, werden signaallampjes voorzien. Zo ziet de operator constant de status van de robot: Rood betekent dat geen samenwerking met de mens mogelijk is, en de robot op volle snelheid mag werken. Wanneer het ledje groen wordt, kan de mens opnieuw tussenkomen en handelingen uitvoeren.
Op de grijper staat, ten slotte, een knop die de operator indrukt eens de taak af is. Dan pas keert de robot terug naar de bak om een nieuwe steen te halen.
Louwers Mediagroep
Kapellestraat 132/1
Gebouw G
8020 Oostkamp, België
 © 1987 - 2025 Louwersmediagroep.
© 1987 - 2025 Louwersmediagroep.