Platform over productie- en procesautomatisering

Met beweging in verschillende richtingen en het slim koppelen aan vrijwel elke magazijnwagen in minder dan twintig seconden maken deze nieuwe robots materiaalverwerking sneller en veiliger.
“In 2018 was ik bij een vriend die eigenaar was van een magazijn waar een combinatie van grote en zware goederen op zowel magazijnwagens als pallettrucks werd geladen. Hij toonde me hoe lastig het was om deze wagens snel en accuraat te verplaatsen en vroeg mij om hulp. Ik besefte dat het met een speciaal robotontwerp mogelijk zou zijn om de verschillende wagens die al in gebruik waren te verplaatsen, waardoor de uitdagingen van grootte, gewicht en tijd zouden worden weggenomen”, vertelt Keshav Chintamani, CEO van Tractonomy Robotics, een start-up gevestigd in Gent, België. En als iemand het kan weten, dan hij wel. Hij heeft namelijk een achtergrond in robotica-onderzoek voor de ruimtevaart.
Keshav ontdekte dat veel automatisch geleide voertuigen (AGV’s) die zijn gebouwd voor het verplaatsen van magazijnwagens, gebaseerd waren op een ontwerp dat de last van onderuit optilt. Het kostte de robots echter tijd – soms zelfs meerdere minuten – om zichzelf onder de wagen te manoeuvreren. Als een wagen niet helemaal netjes recht stond, moest het automatisch geleide voertuig zelfs stoppen en resetten. Vaak waren er beperkingen in het gewicht dat deze robots konden tillen en bestond het gevaar dat de wagen zou omvallen.
Het onderzoek richtte zich vervolgens op AGV’s die een magazijnwagen konden trekken, maar deze AGV’s waren ofwel permanent verbonden met de wagen, of ze hadden koppelingsmechanismen die niet erg nauwkeurig waren en nog steeds lang nodig hadden om te koppelen. Toen werd echter een robotische grijperarm ontdekt als koppelingsmechanisme die betrouwbaar aan de wagen ‘vast kon klikken’. Hiermee zou het nieuwe ontwerp zich aan elke soort wagen kunnen aanpassen en deze veilig kunnen slepen.
Om vrije beweging mogelijk te maken, wilde Keshav dit koppelingsmechanisme combineren met een platform voor autonome mobiele robots (AMR). Navigatie door middel van lasers helpt voor obstakels uit te wijken en dynamische en accurate beweging mogelijk te maken. Zodoende zou de evolutie tot AMR magazijntransport sneller en efficiënter helpen maken.
De AMR moest zich nog steeds binnen een magazijn met beperkte ruimte verplaatsen om nauwkeurig te koppelen aan een wagen, gepositioneerd in een strak opeengepakte rij. Door gebruik te maken van Mecanum-wielen kon de AMR zich dankzij dit omnidirectionele wielontwerp vrij verplaatsen in volle ruimtes. De belangrijkste stap om koppelingssnelheid en accuratesse evenals voorwaartse beweging te optimaliseren, was echter de specificatie van een nauwkeurige vierwielaandrijving. “Maxon motoren worden vanwege hun prestaties en betrouwbaarheid in veel academische onderzoeksprojecten gebruikt, ook in het ruimtevaartonderzoek waaraan ik heb gewerkt.
Dit waren dan ook de motoren die ik als eerste onderzocht heb,” aldus Keshav.
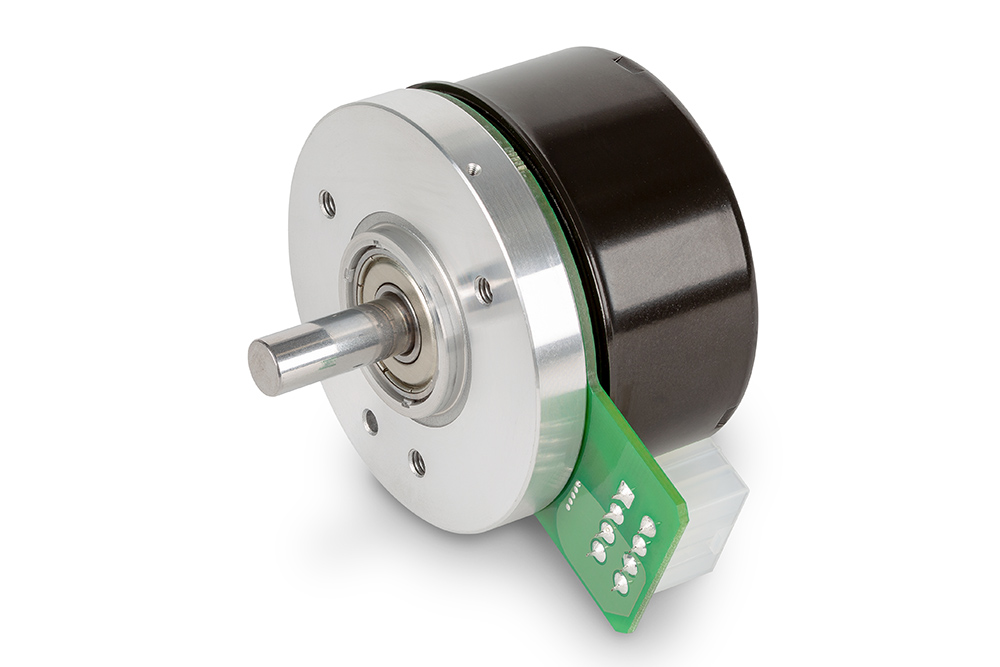
Het aandrijfsysteem moest het slepen van hoge gewichten mogelijk maken en voldoende koppel genereren om een lading van een paar honderd kilogram vanuit stilstand in beweging te brengen. Aangezien de AMR in krappe magazijnomgevingen moest werken, was het eerste ontwerp slechts 70 cm lang en 50 cm breed. Een compacte motor was hierin dan ook van essentieel belang. Na enkele proeven werd een platte, borstelloze DC-motor van maxon, de EC60, gekozen voor deze taak. Met vier motoren per robot – één per wiel – moest het ontwerp ook voordelig zijn voor serieproductie, gezien de motoren ook moesten worden geïntegreerd met encoders met hoge resolutie.
“We hebben deze motoren getest in het ATR1-prototype en ze waren echt indrukwekkend. Ze konden een wagen trekken met het gewicht van drie personen aan boord, en dit zijn echt minuscule motoren, slechts 60 mm breed”, vertelt Keshav.
Nu het concept was bevestigd, was Tractonomy Robotics geboren, waarbij het inaugurele design naamgever werd voor de ATR1: de Autonomous Towing Robot (autonome sleeprobot). De ATR1 kan elk type wagen tot 400 kg gewicht slepen bij snelheden van meer dan 1 m/s. Geholpen door een speciale navigatiestack kan de robot snel koppelen. De ATR kan zelfs vrije plaatsen detecteren en daar automatisch wagens parkeren. Dit navigatiesysteem maakt gebruik van camera’s en computervisie-feedback, en de regelnauwkeurigheid is het resultaat van de snelle reactie van de motoren.
“De ATR1 kan in minder dan twintig seconden nauwkeurig en betrouwbaar aan wagens koppelen en zichzelf in krappe ruimtes positioneren, dankzij zijwaartse manoeuvres, ook ‘strafing’ genoemd, met subtiele aanpassingen om haarfijne accuratesse te garanderen”, aldus Keshav.

Na proeven van de ATR1 kreeg Tractonomy Robotics aanvragen voor het slepen van nog zwaardere lasten, zoals plaatmetaal met gewichten van 800 kg en meer. Deze vraag leidde tot een radicaal nieuw ontwerp: de ATR2, een robot met een uniek, adaptief koppelsysteem met twee armen, die een groot aantal wagenformaten kan verplaatsen. Tractonomy wil van de ATR2 een versie met normaal koppel en een versie met hoog koppel produceren, met verwachte sleepcapaciteiten van respectievelijk 600 kg en 800 kg en snelheden tussen 1,8 m/s en 2,5 m/s (6,5 km/uur tot 9 km/uur).
De afmetingen van de ATR2 zijn vergroot van 70×50 cm naar 90×64 cm om meer accu’s en nieuwe elektronica mogelijk te maken, maar om de zwaardere lasten te verplaatsen en toch compact te blijven, waren motoren met aanzienlijk hoger koppel vereist.
“Op advies van ingenieurs van maxon konden we een motor met lagere spanning gebruiken die in het algehele systeem past, maar toch de pieksnelheid en het piekkoppel bereikt voor de zwaardere last, terwijl de opwarming binnen de thermische grenswaarden blijft”, vertelt Keshav. “Dankzij dit belangrijke advies kunnen we met het gebruik van slechts twee typen motoren één enkel platform aanbieden dat geschikt is voor een breed assortiment van wagens en lasten.” Wanneer zwaardere lasten bij hogere snelheden worden gesleept, wordt de remkracht des te belangrijker. Daarom heeft de ATR2 een geïntegreerd remsysteem en een 360°-veiligheidssysteem dat botsingen voorkomt. Aangezien de robot 24 uur per dag werkt, is ook de betrouwbaarheid van de componenten van groot belang.“Deze machines rijden 15-20 km per dag, onder variabele omstandigheden. Fouten verminderen de productiviteit, dus is het erg belangrijk een betrouwbare oplossing te hebben”, licht Keshav toe.
De ATR2 ondergaat nu operationele validatie en Tractonomy concentreert zich op serieproductie. De AMR is hoofdzakelijk gericht op de sectoren productie en distributielogistiek die afhankelijk zijn van materiaalverwerkingstechnologieën, bijvoorbeeld fabrieken, grote magazijnen voor supermarkten en postkantoren. De robots kunnen ook worden gebruikt voor het laden en lossen van magazijnwagens uit vrachtwagens, en ze kunnen een goedkoop alternatief bieden voor traditionele logistieke treintjes en transportbandsystemen, en een veiliger en geautomatiseerd alternatief voor vorkheftrucks zijn.
Keshav voegt toe: “We zien een toenemende behoefte aan één type machine die veel verschillende materiaalverwerkingstaken op zich kan nemen, omdat dit kosten verlaagt en de organisatie voor de eindgebruiker gemakkelijker maakt. Met slechts één robot, die meerdere materiaalverwerkingsfuncties kan uitvoeren, voorziet Tractonomy in deze flexibiliteit.”
MAXON BENELUX – Stand 137
High precision drive systems sinds 1961. Bij maxon ontwikkelen en bouwen wij zeer nauwkeurige elektrische aandrijfsystemen die tot...
Bekijk BedrijfsprofielLouwers Mediagroep
Domein de Herten
Hertsbergsestraat 4
8020 Oostkamp, België



